Переводим с английского (математика)
Другие книги и статьи Антонова В.М.
МОЗГ
МАТРИЧНАЯ
МОДЕЛЬ
История создания

Матричная модель мозга
Структуру мозга можно представить в
виде матрицы, строки которой соединены с рецепторами очувствления, а столбцы –
с исполнительными мышцами.
Контакты строк со столбцами
осуществляются с помощью синапсов, проводимости которых формируются
автоматически в процессе обучения.
Нейроны, соединяющие рецептры очувствления со строками матрицы мозга, называются
сенсонейронами, а нейроны, соединяющие столбцы
матрицы с исполнительными мышцами – мотонейронами.
Сигналы мозга и всей нервной
системы представляют собой порции управляющей жидкости. Эти порции
выдавливаются из рецепторов очувствления и доставляются сенсонейронами
к мозгу; там они переходят через синапсы на мотонейроны
и по ним доходят до исполнительных мышц и вызывают их сокращение. Такая
гидравлика сигналов даёт основание считать модель всей нервной системы – биогидравлической.
Результирующий сигнал управления E на каждую отдельную мышцу,
формируемый матричным мозгом, определяется как общий поток управляющей
жидкости, переходящий через синапсы на мотонейрон
данной мышцы со всех контактирующих с ним сенсонейронов
за вычетом утечек Q:
E = Σ(bi · ci) – Q
Здесь bi – поток управляющей
жидкости, выдавленный i-ым
рецептором очувствления под воздействием внешнего раздражения; ci – проводимость соответствующего
синапса (она может изменяться от 0 до 1).
Пределами результирующего сигнала
могут быть Emin = 0 и Emax = Σbi
Синапс представляет собой
микроскопический зазор (щель) между сомкнувшимися сенсонейроном и мотонейроном.
Выдавленная из сенсонейрона в синаптический
зазор управляющая жидкость вступает в химический процесс с особым компонентом –
эмоветором, поставляемым на синапс извне, и вызывает
изменение его проводимости.
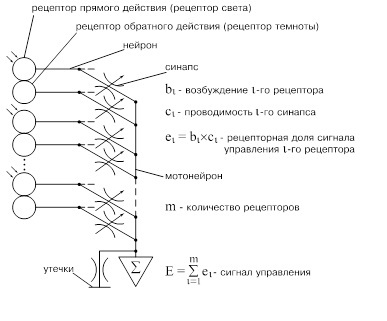
Фрагмент матричной структуры мозга
с одним столбцом
Эмоветоры вырабатываются эмоционными
железами и бывают двух типов. При благоприятном ходе обучения вырабатывается положительный эмоветор, а при
неблагоприятном ходе – отрицательный. Первый способствует росту белковых
молекул и вызывает зарастание синаптического зазора.
Второй тип эмоветора вызывает, наоборот, разрушение
белковых молекул и приводит к увеличению зазора. В первом случае уменьшаются синаптические утечки и
увеличивается проводимость синапса, а во втором – увеличиваются утечки и
уменьшается проводимость. В этом и состоит процесс обучения мозга.
Алгоритм обучения матричного мозга
1. Фактический сигнал управления Ef :
Ef =Σ(bi · ci*)
bi – возбуждение i-го рецептора;
сi* - проводимость соответствующего синапса,
сложившаяся в предыдущей ситуации.
2. Погрешность сигнала управления ΔEj в
j-ой ситуации:
ΔEj = Ej – Ef
Ej – требуемый сигнал управления.
3. Поправка проводимости синапса Δci :
![]()
4. Новая проводимость синапса ci :
ci = ci* + Δci
Хронология создания матричной модели мозга
1985 – Предложена биогидравлическая
модель нервных систем с матричной структурой мозга; автор Антонов В.М.
1985 – На основе биогидравлической
модели нервной системы с матричной структурой мозга разработаны обучаемые
системы управления, на изобретение которых поданы несколько заявок.
«Обучаемая система управления», автор Антонов
В.М., заявл. 29 августа 1985 года и зарегистрирована
под №3949838/08 Государственным комитетом СССР по делам изобретений и открытий.
«Обучаемая и самообучающаяся система управления
и регулирования», автор Антонов В.М., заявл. 10
октября 1985 года и зарегистрирована под №3965056/08.
«Обучаемое устройство для распознавания образов»,
автор Антонов В.М., заявл. 18 октября 1985 года и
зарегистрирована под №3971956/08.
1985 – Признано изобретением «Рецепторный
датчик положения обучаемой системы управления», авторы Антонов В.М., Кавыгин В.В. Авт. св. СССР
1986-87 – Произведено математическое
моделирование обучаемых систем управления, основанных на матричной модели
мозга. Получены выражения для сигналов управления на выходе системы в
зависимости от возбуждения рецепторов и выражение для поправки проводимостей
отдельных элементов мозга в зависимости от возбуждения соответствующего
рецептора и от погрешности сигнала управления. Разработан алгоритм обучения
матричного мозга. Материалы опубликованы в следующих работах.
Антонов В.М., Кавыгин
В.В., Буков А.А. «Программируемая обучаемая система автоматической
диагностики». Отчёт по НИР, инвент.1_02870048066/ Липецкий политехнический
институт, 1986.
Антонов В.М., Буков А.А. «Вычислительная модель
обучаемой системы управления». Тез. докл. конф.
«Опыт и проблемы внедрения робототехники и ГАП на промышленных предприятиях
области». 8-9 дек. 1987. Липецк.
1987 – Признано изобретением «Датчик
перемещения для обучаемой системы управления», автор Антонов В.М. Авт. св. СССР
1988 – Признано изобретением «Обучаемое
оптическое устройство управления элементом перемещения», авторы Антонов В.М.,
Буков А.А. Авт. св. СССР 1647604,G
06 K 9/00, заявл.
09.11.1988, опубл. 07.05.1991, бюл.
№17.
1989 – Установлена на робот
ТУР-10К первая техническая система управления, работающая по принципу
матричного мозга.

Она включала глаз с сетчаткой из 140
фоторецепторов, расположенный непосредственно на схвате,
и технический мозг с выходами на три исполнительных двигателя, закреплённый на
руке робота.
1990 – Выдан патент «Обучаемое устройство
управления», авторы Антонов В.М., Буков А.А. Пат. РФ
1990 – Признано изобретением «Обучаемая система
управления», авторы Антонов В.М., Буков А.А. Авт. св. СССР
1990 – Выдан патент «Обучаемая система
управления», авторы Антонов В.М., Буков А.А. Пат. РФ 2068575,
1990-91 – Разработаны, изготовлены, установлены на роботы и
опробованы в работе различные конструкции обучаемых систем управления. Одна из
них – ОСУ-200х12 имела глаз с 200 фоторецепторами и технический мозг на 12
приводов.
1994 – Выдан патент «Обучаемая система
управления», авторы Антонов В.М., Буков А.А. Пат. РФ
1997 – Выдан патент «Техническая нервная
система», авторы Буков А.А., Антонов В.М. RU 2128857, C1,
1998 – Книга Антонов В.М. «Обучаемые системы управления».-
Липецкий гос. тех. университет, Липецк, 1998.- 415 с.
2001 – Книга Буков А.А. «Технические нервные системы» /
Липецкий гос. тех. университет, Липецк, 2001. 223 с.
Учебник
по матричному мозгу
Антонов В.М. «Мозг. Русская теория» / 2015
Содержание
1. Зарождение жизни – промысел Высшего Разума
2. Неподвижные и подвижные живые организмы
3. Двигательный аппарат
4. Нейробиология.
Нейрофизиология
5. Механицизм нейрофизиологии
6. Мышцы. Назначение
7. Мышцы. Устройство и работа
8. Сигнал управления мышцей
9. Мотонейроны
10. Очувствление. Рецепторы
11. Рецепторная среда
12. Сенсонейроны
13. Глотательный рефлекс
14. Скорость нейронного сигнала
15. Синапсы. Компонейроны.
Мозг
16. Мозг. Рефлексы
17. Мозг. Инстинкты
18. Мозг. Навыки
19. Мозг. Навыки. Обучение
20. Мозг. Навыки. Алгоритм обучения
21. Образная математика
22. Алгоритм обучения мозга в образной
математике
23. Ход обучения в двух ситуациях
24. Сходимость процесса обучения
25. Двуступенчатый
мозг
26. Мимика и поза
27. Тонус
28. Настроение
29. Внутренний язык
30. Сосредоточение внимания
31. Самосознание
32. Память навыкового
мозга
33. Надёжность навыкового
мозга
34. Мыслительный мозг
35. Мышление
36. Мышление. Внутренний язык
37. Скачущий взор человека
38. Логика мышления
39. Логика страстей
40. Мышление и творчество
41. Восприятие речи
42. Чтение
43. Речь и письменность
44. Познание
45. Воля
46. Трёхступенчатое управление
47. Сон. Сновиденья
48. Гипноз
49. Боль
50. Зачем у мозга два полушария?
51. Эмоции
52. Нейрофизиология эмоций
53. Уныние
54. Консерватизм и обновленчество
55. Хлебоеды и
мясоеды
56. Усидчивость
57. Настойчивость и уступчивость
58. Черты характера
59. Наклонности и влечения
60. Мораль и нравственность
Составитель Антонов Владимир Михайлович
Февраль 2016 года